Getting started with Ardone 2, Ubuntu, VirtualBox and ROS (Part 2)
17 Jan 2017Getting started with Ardone 2, Ubuntu, VirtualBox and ROS (Part 2)
Now that you have Ubuntu up and running in VirtualBox
Continuing on with installation…
Right so while still having the terminal open type the following (to get these installed):
sudo apt-get install ros-kinetic-ardrone-autonomy ros-kinetic-joystick-drivers python-rosinstall
sudo apt-get install libsdl1.2-dev libsdl-image1.2-dev libsdl-mixer1.2-dev libsdl-ttf2.0-dev libpulse-dev libxt-dev openssh-server
Initialize rosdep
Might be a good idea to initialize rosdep and also add environmental variables, and update and reboot to be sure to be sure.
sudo rosdep init
rosdep update
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
sudo apt-get update
reboot
Configure Catkin and mikehamer/ardrone_tutorials package
Now we want to initialize catkin which we will need for the tutorial code (please note since i called my user server during setup my home directory is /home/server/
mkdir /home/server/ros_workspace/
mkdir /home/server/ros_workspace/src/
cd /home/server/ros_workspace/src/
catkin_init_workspace
cd /home/server/ros_workspace/
catkin_make
source /home/server/ros_workspace/devel/setup.bash
echo "source /home/server/ros_workspace/setup.bash" >> ~/.bashrc
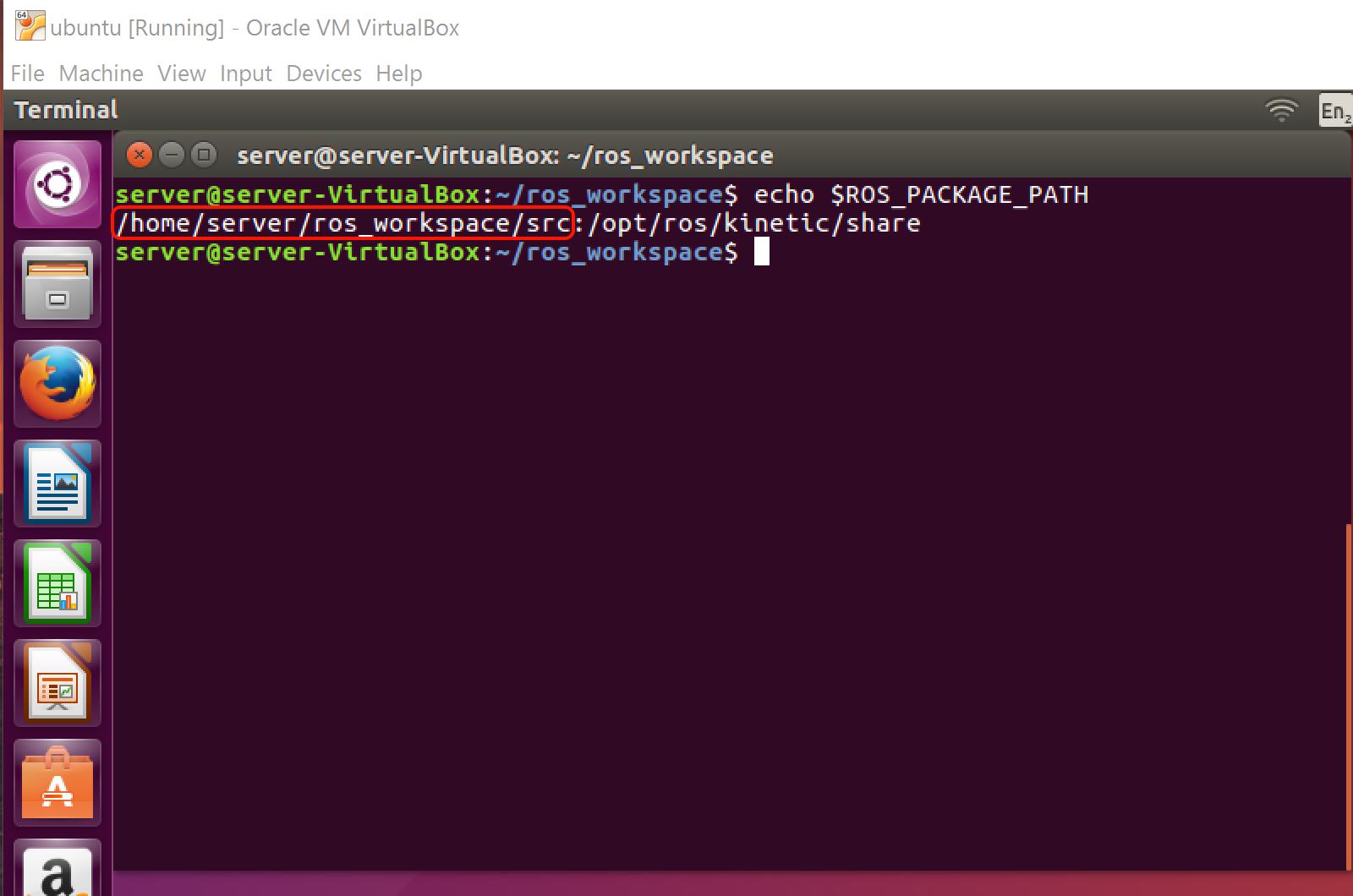
echo $ROS_PACKAGE_PATH
The result should be something like
#$ /home/server/ros_workspace/src:/opt/ros/kinetic/share
Now lets configure mikehamer/ardrone_tutorials package
cd /home/server/ros_workspace/src/
git clone https://github.com/mikehamer/ardrone_tutorials.git
ls -la
cd /home/server/ros_workspace/
catkin_make
rosmake -a
Well hopefully that installs the tutorials but we are not yet done :( since there is a dependancy on some python packages :O
sudo apt-get install python-pyside